




രൂപകൽപ്പനഫോട്ടോണിക്ഇന്റഗ്രേറ്റഡ് സർക്യൂട്ട്
ഫോട്ടോണിക് ഇന്റഗ്രേറ്റഡ് സർക്യൂട്ടുകൾഇന്റർഫെറോമീറ്ററുകളിലോ പാത്ത് ലെങ്ത് സെൻസിറ്റീവ് ആയ മറ്റ് ആപ്ലിക്കേഷനുകളിലോ പാത്ത് ലെങ്തിന്റെ പ്രാധാന്യം കണക്കിലെടുത്ത് (PIC) പലപ്പോഴും ഗണിതശാസ്ത്ര സ്ക്രിപ്റ്റുകളുടെ സഹായത്തോടെയാണ് രൂപകൽപ്പന ചെയ്തിരിക്കുന്നത്.ചിത്രംഒരു വേഫറിൽ ഒന്നിലധികം പാളികൾ (സാധാരണയായി 10 മുതൽ 30 വരെ) പാറ്ററിംഗ് ചെയ്താണ് ഇത് നിർമ്മിക്കുന്നത്, ഇവ പലപ്പോഴും GDSII ഫോർമാറ്റിൽ പ്രതിനിധീകരിക്കപ്പെടുന്നു, നിരവധി പോളിഗോണൽ ആകൃതികൾ ചേർന്നതാണ്. ഫോട്ടോമാസ്ക് നിർമ്മാതാവിന് ഫയൽ അയയ്ക്കുന്നതിന് മുമ്പ്, രൂപകൽപ്പനയുടെ കൃത്യത പരിശോധിക്കുന്നതിന് PIC സിമുലേറ്റ് ചെയ്യാൻ കഴിയുന്നത് വളരെ അഭികാമ്യമാണ്. സിമുലേഷൻ ഒന്നിലധികം ലെവലുകളായി തിരിച്ചിരിക്കുന്നു: ഏറ്റവും താഴ്ന്ന ലെവൽ ത്രിമാന ഇലക്ട്രോമാഗ്നറ്റിക് (EM) സിമുലേഷനാണ്, ഇവിടെ സിമുലേഷൻ ഉപ-തരംഗദൈർഘ്യ തലത്തിലാണ് നടത്തുന്നത്, എന്നിരുന്നാലും മെറ്റീരിയലിലെ ആറ്റങ്ങൾ തമ്മിലുള്ള ഇടപെടലുകൾ മാക്രോസ്കോപ്പിക് സ്കെയിലിലാണ് കൈകാര്യം ചെയ്യുന്നത്. സാധാരണ രീതികളിൽ ത്രിമാന ഫിനിറ്റ്-ഡിഫറൻസ് ടൈം-ഡൊമെയ്ൻ (3D FDTD), ഐജൻമോഡ് എക്സ്പാൻഷൻ (EME) എന്നിവ ഉൾപ്പെടുന്നു. ഈ രീതികൾ ഏറ്റവും കൃത്യമാണ്, പക്ഷേ മുഴുവൻ PIC സിമുലേഷൻ സമയത്തിനും അപ്രായോഗികമാണ്. അടുത്ത ലെവൽ ഫിനിറ്റ്-ഡിഫറൻസ് ബീം പ്രൊപ്പഗേഷൻ (FD-BPM) പോലുള്ള 2.5-ഡൈമൻഷണൽ EM സിമുലേഷനാണ്. ഈ രീതികൾ വളരെ വേഗതയുള്ളതാണ്, പക്ഷേ ചില കൃത്യത ത്യജിക്കുകയും പാരാക്സിയൽ പ്രൊപ്പഗേഷൻ മാത്രമേ കൈകാര്യം ചെയ്യാൻ കഴിയൂ, ഉദാഹരണത്തിന് റെസൊണേറ്ററുകൾ സിമുലേറ്റ് ചെയ്യാൻ ഉപയോഗിക്കാൻ കഴിയില്ല. അടുത്ത ലെവൽ 2D FDTD, 2D BPM പോലുള്ള 2D EM സിമുലേഷനാണ്. ഇവയും വേഗതയേറിയവയാണ്, പക്ഷേ പരിമിതമായ പ്രവർത്തനക്ഷമതയുള്ളവയാണ്, ഉദാഹരണത്തിന് അവയ്ക്ക് പോളറൈസേഷൻ റൊട്ടേറ്ററുകൾ സിമുലേറ്റ് ചെയ്യാൻ കഴിയില്ല. മറ്റൊരു ലെവൽ ട്രാൻസ്മിഷൻ,/അല്ലെങ്കിൽ സ്കാറ്ററിംഗ് മാട്രിക്സ് സിമുലേഷൻ ആണ്. ഓരോ പ്രധാന ഘടകവും ഇൻപുട്ടും ഔട്ട്പുട്ടും ഉള്ള ഒരു ഘടകമായി ചുരുക്കിയിരിക്കുന്നു, കൂടാതെ കണക്റ്റുചെയ്ത വേവ്ഗൈഡ് ഒരു ഫേസ് ഷിഫ്റ്റ്, അറ്റൻവേഷൻ എലമെന്റായി ചുരുക്കിയിരിക്കുന്നു. ഈ സിമുലേഷനുകൾ വളരെ വേഗതയുള്ളതാണ്. ട്രാൻസ്മിഷൻ മാട്രിക്സിനെ ഇൻപുട്ട് സിഗ്നൽ കൊണ്ട് ഗുണിച്ചാണ് ഔട്ട്പുട്ട് സിഗ്നൽ ലഭിക്കുന്നത്. ഘടകത്തിന്റെ മറുവശത്തുള്ള ഇൻപുട്ട്, ഔട്ട്പുട്ട് സിഗ്നലുകൾ കണ്ടെത്തുന്നതിന് സ്കാറ്ററിംഗ് മാട്രിക്സ് (അതിന്റെ ഘടകങ്ങളെ S-പാരാമീറ്ററുകൾ എന്ന് വിളിക്കുന്നു) ഒരു വശത്തുള്ള ഇൻപുട്ട്, ഔട്ട്പുട്ട് സിഗ്നലുകളെ ഗുണിക്കുന്നു. അടിസ്ഥാനപരമായി, സ്കാറ്ററിംഗ് മാട്രിക്സിൽ മൂലകത്തിനുള്ളിലെ പ്രതിഫലനം അടങ്ങിയിരിക്കുന്നു. സ്കാറ്ററിംഗ് മാട്രിക്സ് സാധാരണയായി ഓരോ അളവിലും ട്രാൻസ്മിഷൻ മാട്രിക്സിന്റെ ഇരട്ടി വലുതാണ്. ചുരുക്കത്തിൽ, 3D EM മുതൽ ട്രാൻസ്മിഷൻ/സ്കാറ്ററിംഗ് മാട്രിക്സ് സിമുലേഷൻ വരെ, സിമുലേഷന്റെ ഓരോ ലെയറും വേഗതയ്ക്കും കൃത്യതയ്ക്കും ഇടയിലുള്ള ഒരു ട്രേഡ്-ഓഫ് അവതരിപ്പിക്കുന്നു, കൂടാതെ ഡിസൈൻ വാലിഡേഷൻ പ്രക്രിയ ഒപ്റ്റിമൈസ് ചെയ്യുന്നതിന് ഡിസൈനർമാർ അവരുടെ പ്രത്യേക ആവശ്യങ്ങൾക്കായി ശരിയായ ലെവൽ സിമുലേഷൻ തിരഞ്ഞെടുക്കുന്നു.
എന്നിരുന്നാലും, ചില മൂലകങ്ങളുടെ ഇലക്ട്രോമാഗ്നറ്റിക് സിമുലേഷനെ ആശ്രയിക്കുന്നതും മുഴുവൻ PIC-യെയും അനുകരിക്കാൻ ഒരു സ്കാറ്ററിംഗ്/ട്രാൻസ്ഫർ മാട്രിക്സ് ഉപയോഗിക്കുന്നതും ഫ്ലോ പ്ലേറ്റിന് മുന്നിൽ പൂർണ്ണമായും ശരിയായ ഡിസൈൻ ഉറപ്പുനൽകുന്നില്ല. ഉദാഹരണത്തിന്, തെറ്റായി കണക്കാക്കിയ പാത്ത് ദൈർഘ്യം, ഉയർന്ന ഓർഡർ മോഡുകളെ ഫലപ്രദമായി അടിച്ചമർത്തുന്നതിൽ പരാജയപ്പെടുന്ന മൾട്ടിമോഡ് വേവ്ഗൈഡുകൾ, അല്ലെങ്കിൽ പരസ്പരം വളരെ അടുത്തായിരിക്കുന്ന രണ്ട് വേവ്ഗൈഡുകൾ എന്നിവ അപ്രതീക്ഷിത കപ്ലിംഗ് പ്രശ്നങ്ങളിലേക്ക് നയിക്കുന്നു, സിമുലേഷൻ സമയത്ത് കണ്ടെത്താനാകാതെ പോകാനുള്ള സാധ്യതയുണ്ട്. അതിനാൽ, നൂതന സിമുലേഷൻ ഉപകരണങ്ങൾ ശക്തമായ ഡിസൈൻ വാലിഡേഷൻ കഴിവുകൾ നൽകുന്നുണ്ടെങ്കിലും, ഡിസൈനിന്റെ കൃത്യതയും വിശ്വാസ്യതയും ഉറപ്പാക്കുന്നതിനും ഫ്ലോ ഷീറ്റിന്റെ അപകടസാധ്യത കുറയ്ക്കുന്നതിനും പ്രായോഗിക അനുഭവവും സാങ്കേതിക പരിജ്ഞാനവും സംയോജിപ്പിച്ച് ഡിസൈനറുടെ ഉയർന്ന അളവിലുള്ള ജാഗ്രതയും സൂക്ഷ്മ പരിശോധനയും ഇപ്പോഴും ആവശ്യമാണ്.
സ്പാർസ് FDTD എന്ന് വിളിക്കുന്ന ഒരു സാങ്കേതികത, ഡിസൈൻ സാധൂകരിക്കുന്നതിന്, ഒരു പൂർണ്ണമായ PIC ഡിസൈനിൽ നേരിട്ട് 3D, 2D FDTD സിമുലേഷനുകൾ നടത്താൻ അനുവദിക്കുന്നു. ഏതൊരു ഇലക്ട്രോമാഗ്നറ്റിക് സിമുലേഷൻ ഉപകരണത്തിനും വളരെ വലിയ തോതിലുള്ള PIC അനുകരിക്കാൻ പ്രയാസമാണെങ്കിലും, സ്പാർസ് FDTD-ക്ക് വളരെ വലിയ ഒരു ലോക്കൽ ഏരിയ അനുകരിക്കാൻ കഴിയും. പരമ്പരാഗത 3D FDTD-യിൽ, ഒരു പ്രത്യേക ക്വാണ്ടൈസ്ഡ് വോള്യത്തിനുള്ളിൽ വൈദ്യുതകാന്തികക്ഷേത്രത്തിന്റെ ആറ് ഘടകങ്ങൾ ആരംഭിക്കുന്നതിലൂടെയാണ് സിമുലേഷൻ ആരംഭിക്കുന്നത്. സമയം പുരോഗമിക്കുമ്പോൾ, വോള്യത്തിലെ പുതിയ ഫീൽഡ് ഘടകം കണക്കാക്കുന്നു, അങ്ങനെ പലതും. ഓരോ ഘട്ടത്തിനും ധാരാളം കണക്കുകൂട്ടൽ ആവശ്യമാണ്, അതിനാൽ ഇതിന് വളരെ സമയമെടുക്കും. സ്പാർസ് 3D FDTD-യിൽ, വോള്യത്തിന്റെ ഓരോ പോയിന്റിലും ഓരോ ഘട്ടത്തിലും കണക്കാക്കുന്നതിനുപകരം, സൈദ്ധാന്തികമായി ഒരു അനിയന്ത്രിതമായ വലിയ വോള്യവുമായി പൊരുത്തപ്പെടാനും ആ ഘടകങ്ങൾക്ക് മാത്രം കണക്കാക്കാനും കഴിയുന്ന ഫീൽഡ് ഘടകങ്ങളുടെ ഒരു ലിസ്റ്റ് നിലനിർത്തുന്നു. ഓരോ സമയ ഘട്ടത്തിലും, ഫീൽഡ് ഘടകങ്ങളോട് ചേർന്നുള്ള പോയിന്റുകൾ ചേർക്കുന്നു, അതേസമയം ഒരു നിശ്ചിത പവർ ത്രെഷോൾഡിന് താഴെയുള്ള ഫീൽഡ് ഘടകങ്ങൾ കുറയുന്നു. ചില ഘടനകൾക്ക്, ഈ കണക്കുകൂട്ടൽ പരമ്പരാഗത 3D FDTD-യേക്കാൾ വേഗത്തിൽ നിരവധി ഓർഡറുകൾ ആകാം. എന്നിരുന്നാലും, ഡിസ്പേഴ്സീവ് ഘടനകളെ കൈകാര്യം ചെയ്യുമ്പോൾ സ്പാർസ് FDTDS നന്നായി പ്രവർത്തിക്കുന്നില്ല, കാരണം ഈ സമയ ഫീൽഡ് വളരെയധികം വ്യാപിക്കുന്നു, അതിന്റെ ഫലമായി ലിസ്റ്റുകൾ വളരെ നീളമുള്ളതും കൈകാര്യം ചെയ്യാൻ പ്രയാസകരവുമാണ്. ചിത്രം 1 ഒരു പോളറൈസേഷൻ ബീം സ്പ്ലിറ്ററിന് (PBS) സമാനമായ ഒരു 3D FDTD സിമുലേഷന്റെ ഒരു ഉദാഹരണ സ്ക്രീൻഷോട്ട് കാണിക്കുന്നു.
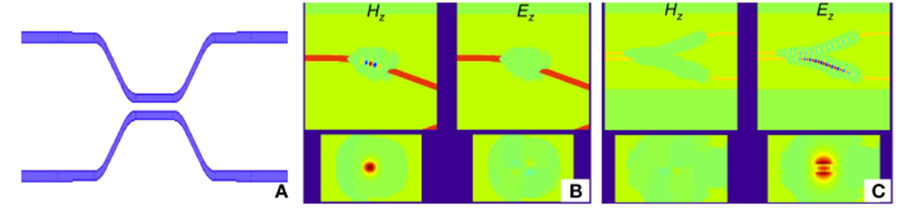
ചിത്രം 1: 3D സ്പാർസ് FDTD യിൽ നിന്നുള്ള സിമുലേഷൻ ഫലങ്ങൾ. (A) എന്നത് സിമുലേറ്റ് ചെയ്യപ്പെടുന്ന ഘടനയുടെ മുകളിലെ കാഴ്ചയാണ്, ഇത് ഒരു ദിശാസൂചന കപ്ലറാണ്. (B) ക്വാസി-TE എക്സിറ്റേഷൻ ഉപയോഗിച്ചുള്ള ഒരു സിമുലേഷന്റെ സ്ക്രീൻഷോട്ട് കാണിക്കുന്നു. മുകളിലുള്ള രണ്ട് ഡയഗ്രമുകൾ ക്വാസി-TE, ക്വാസി-TM സിഗ്നലുകളുടെ മുകളിലെ കാഴ്ച കാണിക്കുന്നു, കൂടാതെ താഴെയുള്ള രണ്ട് ഡയഗ്രമുകൾ അനുബന്ധ ക്രോസ്-സെക്ഷണൽ കാഴ്ച കാണിക്കുന്നു. (C) ക്വാസി-TM എക്സിറ്റേഷൻ ഉപയോഗിച്ചുള്ള ഒരു സിമുലേഷന്റെ സ്ക്രീൻഷോട്ട് കാണിക്കുന്നു.
പോസ്റ്റ് സമയം: ജൂലൈ-23-2024